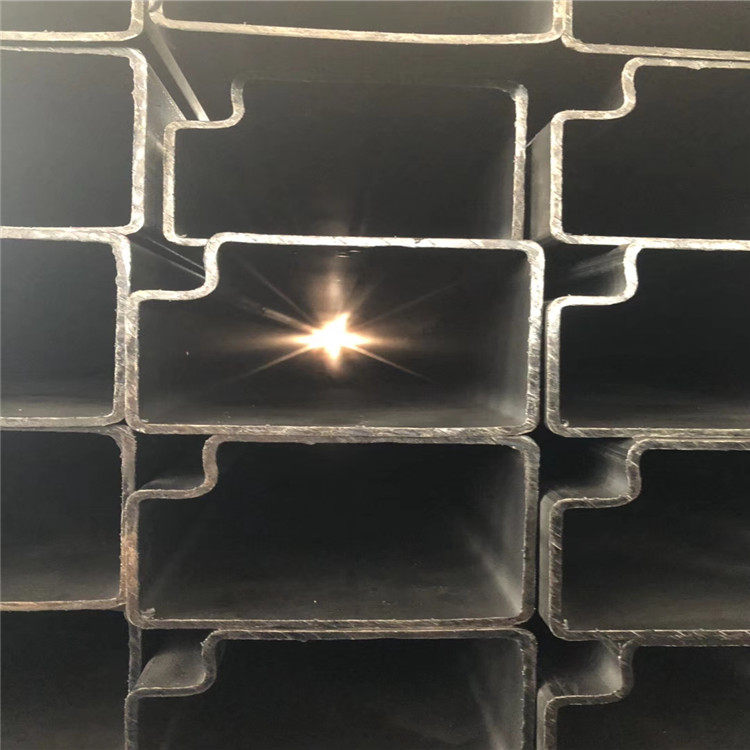
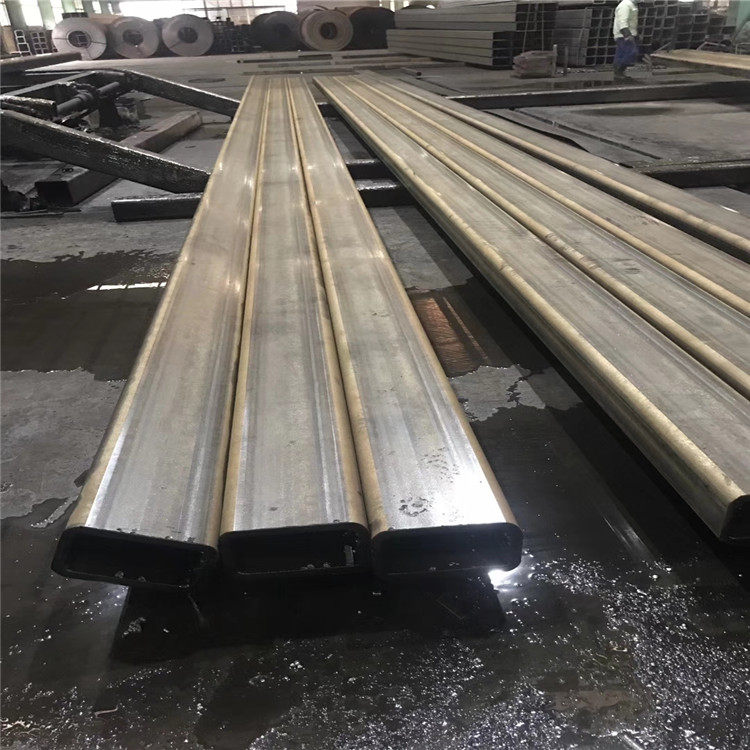
张家界方管厂 征图 76*76*6小口径方管 可定尺定做 货源充足
发布:2024/11/21 23:39:56 来源:wxztgy666张家界方管厂 征图 76*76*6小口径方管 可定尺 货源充足
冷轧钢板就是经过冷轧生产的钢板。冷轧是在室温条件下将 钢板进一步轧薄至为目标厚度的钢板。和热轧钢板比较,冷轧钢板厚度更加,而且表面光滑、漂亮,同时还具有各种优越的机械性能,特别是性能方面。因为冷轧原卷比较脆硬,冷轧钢板的密度不太适合,所以通常情况下冷轧钢板要求经过退火、酸洗及表面平整之后才交给客户。冷轧厚度是.1--8.MM以下,如大部份工厂冷轧钢板厚度是4.5MM以下; 少厚度、宽度是根据各工厂的设备能力和市场需求而决定。

无锡征图钢业有限公司
热轧精密钢管用连铸圆管坯板坯或初轧板坯作原料,经步进式加热炉加热,高压水除鳞后进入粗轧机,粗轧料经切头、尾、再进入精轧机,实施计算机 控制轧制,终轧后即经过层流冷却和卷取机卷取、成为直发卷。直发卷的头、尾往往呈舌状及鱼尾状,厚度、 宽度精度较差,边部常存在浪形、折边、塔形等缺陷。其卷重较重、钢卷内径为760mm。将直发卷经切头、 切尾、切边及多道次的矫直、平整等精整线后,再切板或重卷,即成为:热轧钢板、平整热轧钢卷、纵切带等产品。热轧精整卷若经酸洗去除氧化皮并涂油后即 成热轧酸洗板卷。(1)合理选材。对精密复杂模具应选择材质好的微变形模具钢(如空淬钢),对碳化物偏析严重的模具钢应进行合理锻造并进行调质热,对较大和无法锻造模具钢可进行固溶双细化热。
张家界方管厂 征图 76*76*6小口径方管 可定尺 货源充足
家电行业洗衣机、电冰箱所配的电磁阀,其零部件的结构和工艺都适合于大批量生产。普通电磁阀线圈部件已采用塑料封装,减少引出线断裂的故障,同时易实现防水、防爆等防护要求。阀体、阀盖等部件都已采用精密铸造,锻造等工艺,工程塑料电磁阀也已批量上市。国内防爆电磁阀已不只是隔爆型,还有浇封型、本安型。高压和高温的电磁阀也出现了简化了结构和工艺。智能化方向上的发展这主要是指电磁阀如何与智能仪表更好配合,去提高系统的控制精度和可靠性。4下管前,应先用直径比孔径小2~5毫米,长度不小于4米的疏孔器进行疏孔,检查井孔的圆直度。5下管前应孔底稠泥浆和沉积物,然后进行孔内换浆,由稠到衡逐步进行,换浆以不坍孔为原则,对于易坍塌地层要格外小心。6要组织好人员,分工负责,统一指挥。防止因操作忙乱而出现人为断管、碎管等事故。2钻杆托盘一次下管用钻杆托盘一次下管方法下管就是利用具有足够强度的托盘(见图略)托住管子,利用钻杆将井管一节一节送入井孔中,保证管子始终承受压力。
强度强度是指金属材料在静荷作用下抵抗破坏(过量塑性变形或断裂)的性能。由于载荷的作用方式有拉伸、压缩、弯曲、剪切等形式,所以强度也分为抗拉强度、抗压强度、抗弯强度、抗剪强度等。各种强度间常有一定的,使用中一般较多以抗拉强度作 2结构用冷弯空心型钢标准。
(2)模具结构设计要合理,厚薄不要太悬殊,形状要对称,对于变形较大模具要掌握变形规律,预留余量,对于大型、精密复杂模具可采用组合结构。
(3)精密复杂模具要进行预先热,消除机械过程中产生的残余应力。
(4)合理选择加热温度,控制加热速度,对于精密复杂模具可采取缓慢加热、预热和其他均衡加热的方法来减少模具热变形。
(5)在保证模具硬度的前提下,尽量采用预冷、分级冷却淬火或温淬火工艺。
(6)对精密复杂模具,在条件许可的情况下,尽量采用真空加热淬火和淬火后的深冷。
(7)对一些精密复杂的模具可采用预先热、时效热、调质氮化热来控制模具的精度。
(8)在修补模具砂眼、气孔、磨损等缺陷时,选用冷焊机等热影响小的修复设备以避免修补过程中变形的产生。
另外,正确的热工艺操作(如堵孔、绑孔、机械固定、适宜的加热方法、正确选择模具的冷却方向和在冷却介质中的运动方向等)和合理的回火热工艺也是减少精密复杂模具变形的有效措施。
控制钢水流动的方法分为使用交流电的交变磁场和使用直流电的静态磁场。交变电磁场法是在结晶器两宽面上布置有两极或多级的感应线圈,将交变磁场强加给结晶器内的钢水。采用这种方法的代表性技术是EMS(结晶器电磁搅拌)、EMLS(电磁液面稳定)和EMLA(电磁液面加速)。EMS的感应线圈布置在结晶器上半部,弯月面区域的钢水被强制进行水平方向的环流。EMLS和EMLA的感应线圈布置在浸入式水口的出流股附近,出流可根据浇注状况进行加速(EMLA)或减速(EMLS),以获得的钢水流速。
这三个阶段对应阀流量从大到小,刚始时以较大的组合流量以得到快速响应,随着偏差减少,阀流量逐步降低,到位置后保持输出流量为零。单独使用一种控制算法难以实现系统高速、高精度的控制要求,因此采用了三种控制方法相结合,分别对应系统响应的三个阶段实施控制。 设计的控制器控制算法如下:位移误差|e|ε1时,Bang—Bang控制;位移误差ε1|e|ε2时,PID控制;位移误差|e|≤ε2时,模糊控制。
最新内容
推荐信息
其他信息